
欧洲杯预选赛
0531-82560088
24年欧洲杯预测冠军

0531-82560088

为解决经典PI 控制下电流波动大,反馈电流跟踪性能不佳,导致电流静差过大的问题,在矢量控制的总体框架下引入无差拍电流预测控制。
无差拍是离散控制系统中概念,主要指系统过渡到稳定运行状态的采样周期尽可能缩短,最终目的是让趋近时间达到一种无差的状态。当应用在PMSM 控制系统中时,能够有效降低电机启动和系统因负载变化时所产生的一系列波动,对提高系统的整体控制性能作用明显,但依赖于高精度的电机参数,容易受到参数失配的影响。
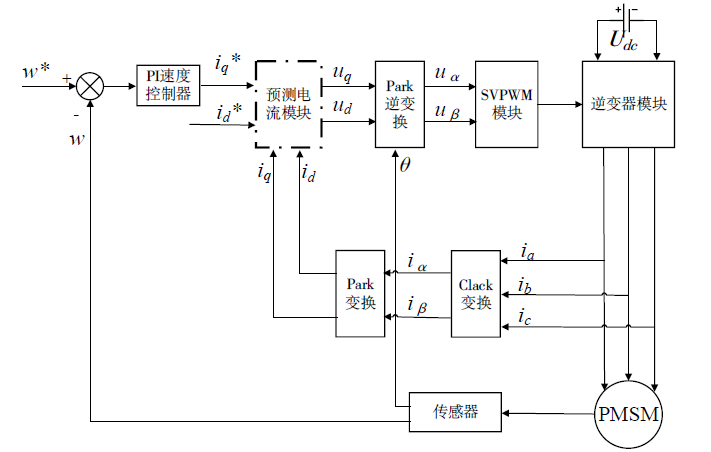
上图1 所示为无差拍预测控制基本框图,其中虚线部分为引入的无差拍预测电流控制(DPCC)控制算法。DPCC 是预测控制的一个发展方向,在PMSM 控制系统中主要应用于电流环中。首先离散化同步旋转坐标系下的数学模型,从而推导出无差拍电流预测的基本控制算法,其次通过在线优化电流误差,并对每个周期的电流进行调整,来计算出作用于当前时刻的指令电压值,并通过SVPWM 调制装置成功计算出作用于开关管的PWM 波,利用此模型可以准确预测出电流在下一周期到达的给定值。由于该算法结合了空间调制技术,其电压利用率高,并且开关频率固定、相电流谐波含量较低、电流响应速度快,所以应用于一些高性能要求的场合。


