
欧洲杯预选赛
0531-82560088
24年欧洲杯预测冠军

0531-82560088

适合用于飞行控制反馈系统、伺服系统中的位置反馈、机床中的自动测量以及其他各种注重长期稳定性的工业和科研机电应用中。
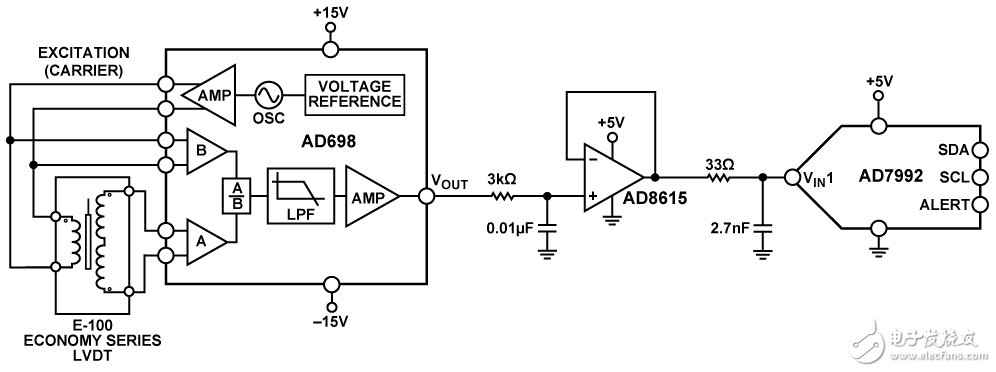
本电路采用 AD698LVDT信号调理器,包含一个正弦波振荡器和一个功率放大器,用于产生驱动原边LVDT的激励信号。 AD698还可将副边输出转换为直流电压。 AD8615轨到轨放大器缓冲 AD698的输出,并驱动低功耗12位逐次逼近型模数转换器(ADC)。系统动态范围为82 dB,带宽为250 Hz,非常适合精密工业位置和计量应用。
采用15 V电源供电时,系统的信号调理电路功耗仅为15 mA;采用+5 V电源供电时,功耗为3 mA。
本电路笔记讨论LVDT基本操作理论和设计步骤,用于优化图1中带宽给定的电路,包括噪声分析和器件选型方面的考虑。
LVDT是绝对位移传感器,可将线性位移或位置从机械参考点(或零点)转换为包含相位(方向)和幅度(距离)信息的比例电信号。移动部件(探头或磁芯杆组件)与变压器之间无需电气接触即可完成LVDT操作。它依赖电磁耦合。由于这个原因,再加上它不采用内置电子电路即可工作, LVDT被广泛用于某些环境下需要具备较长使用寿命和较高可靠性的应用,如军事和航空航天应用。
AD698是一款完整的LVDT信号调理子系统。它能够以较高精度和可重复性将LVDT传感器机械位置转换为单极性直流电压。所有电路功能均集成于片内。只要增加几个外部无源元件以设置频率和增益, AD698就能将原始LVDT 副边输出转换为一个比例直流信号。
AD698内置一个低失真正弦波振荡器,用来驱动LVDT原边。正弦波频率由单个电容决定,频率范围为20 Hz至20 kHz,幅度范围为2 V RMS至24 V RMS。
LVDT副边输出由两个正弦波组成,用来直接驱动 AD698。 AD698通过同步解调幅度调制输入(次级,A)和固定输入参考电压(初级、次级求和或固定输入,B)解码 LVDT。之前解决方案的一个常见问题是驱动振荡器幅度的任何漂移都直接导致输出的增益误差。 AD698计算 LVDT输出与其输入激励的比值,抵消任何漂移的影响,从而消除了这些误差。该器件与AD598 LVDT信号调理器不同,它具有不同的电路传递函数,且无需LVDT次级端求和(A + B)与冲程长度保持一致。
AD698的框图见图2。输入由两个独立的同步解调通道组成。B通道监控LVDT的驱动激励。C2对全波整流输出进行过滤,然后将其发给运算电路。除外部提供比较器引脚外,通道A性能完全相同。由于LVDT为空时A通道可能达到0 V输出,因此通常使用初级端电压(B通道)触发A通道的解调器。此外,可能需要相位补偿网络,以便向A通道增加相位超前或滞后,补偿LVDT初级端到次级端的相移。对于半桥电路而言,相移并不重要,且A通道电压足以触发解调器。
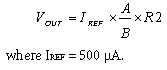
两个通道都完成解调及滤波后,使用一个配备了占空比乘法器的分压电路计算A/B的比值。分压器的输出就是占空比。若A/B等于1,则占空比为100%。(若需要脉冲宽度调制输出,可使用该信号)。占空比驱动电路,调制并过滤与占空比成正比的基准电流。输出放大器调节500 A基准电流,将其转换为电压。输出传递函数为:
遵循 AD698数据手册中的双电源操作(15 V)设计程序,将激励频率设为2.5 kHz、系统带宽设为250 Hz、输出电压范围设为0 V至5 V。
AD698内部振荡器通常可产生少量纹波,会传递到输出端。使用无源低通滤波器降低该纹波至要求的水平。
选择电容值以设置系统带宽时,需要作出某些权衡。选择较小的电容值将使系统具有较高的带宽,但会增加输出电压纹波。该纹波可通过增加反馈电阻两端的并联电容值得以抑制(反馈电阻用于设置输出电压电平),但这样做会增加相位滞后。
AD8615运算放大器缓冲 AD698的输出,而AD698可确保以低阻抗源驱动 AD7992ADC(高阻抗源会极大地降低ADC的交流性能)。
AD8615的内部保护电路使输入端得以承受高于电源电压的输入电压。这很重要,因为 AD698的输出电压能够在15 V 的电源下摆动11 V。只要输入电流限制在5 mA以内,输入端便可施加更高的电压。这主要是因为 AD8615 (1 pA)具有极低的输入偏置电流,因此可使用更大的电阻。使用这些电阻会增加热噪声,导致放大器总输出电压噪声增加。
AD8615是用于缓冲并驱动12位SAR ADC AD7992输入的理想放大器,因为它具有输入过压保护,并且具备输入端和输出端轨到轨摆动能力。
若所有信号调理器件已选定,则必须确定转换信号所需的分辨率。如同大多数的噪声分析一样,只需考虑几个关键参数。噪声源以RSS方式叠加;因此,只需考虑至少高于噪声源三至四倍的任何单个噪声源即可。
对于LVDT信号调理电路而言,输出噪声的主要来源是 AD698的输出纹波。相比之下,其他噪声源( AD8615) 的电阻噪声、输入电压噪声和输出电压噪声)要小得多。
当电容值为0.39 F且反馈电阻两端的并联电容为10 nF(如图 3所示)时, AD698的输出电压纹波为0.4 mV rms。请注意,图1中的简化原理图并未显示这些器件以及相关的引脚连接;但详情可参见 AD698数据手册。
系统的总输出动态范围可这样计算:将满量程输出信号(5 V) 除以总输出均方根噪声(0.4 mV rms),然后转化为dB,其结果约等于82 dB。

AD7992作为此应用的良好备用器件,与3.4 MHz串行时钟配合使用时,具有12位分辨率和每通道188 kSPS的采样速率。
AD698将返回信号与初级端参考振荡器的输入相乘,并通过解调产生输出信号。少量的相移就会导致大量的线性误差,对输出而言就是欠冲。
相位超前网络可补偿E-100系列LVDT中初级到次级的3相移。图4显示了两种不同的相位补偿网络。
为合适的网络选取元件值时,重要的是需注意RS 和R T 有效地构成了一个电阻分压器,在激励信号达到 AD698的 ACOMP输入之前降低其幅度。这表示R T 需比RS 大得多。滞后/超前电路还给激励输出增加负载,因此建议采用较大的电阻值。最终目标是以较小的幅度下降,在 AD698ACOMP输入端达到所需的相位滞后/超前。
由于低通滤波器位于 AD698输出级和 AD8615输入级之间,数据便可从 EVAL-CN0301-SDPZ评估板收集,如图6所示。
在美国,无人驾驶飞行器(UAV),或称无人驾驶飞机,正在方面扮演着越来越重要的角色。这些高科技、复杂的高空作业平台受控于数英里外的人员,并且支持多任务。它们含有诸如空中侦察、作战武器平台、战场战区指挥和控制监督或无人空中加油站等功能。
UAV上这种复杂的系统采用无数电子传感器,用于精确控制和反馈。若要控制UAV的高度(俯仰、滚动和偏航),则需使用执行器对飞行控制表面施加作用力。这些执行器能否对位置实现精确测量对于保持正确的飞行路径非常关键。
用于测量执行器位置的传感器需要满足三个基本标准:精度高、可靠性高和重量轻。由Measurement SpecialTIes,Inc. 公司设计的LVDT可满足全部三个属性。
在许多应用中,将大量LVDT近距离使用,如多计数测量。若这些LVDT以相似的载波频率运行,杂散磁耦合可能导致拍频。产生的拍频可能会影响这些条件下的测量精度。为避免这种情况,所有LVDT均同步工作。
EVAL-CN0301-SDPZ 评估板经配置后(采用短路跳线),可在两个LVDT之间形成一个主振荡器。 每个LVDT原边均以其自身的功率放大器驱动,以便在 AD698器件之间共享热负载。
适用的单电源放大器包括 AD8565 和 AD8601。由于具有输入过压保护以及输入端和输出端的轨到轨摆动能力,这些放大器是 AD8615合适的替代品。若需采用双电源工作,则建议使用 ADA4638-1或 ADA4627-1。


